steering_control
舵机是由pwm信号控制
舵机由三根接线两根电源接线一根pwm信号线我们控制舵机只需要一根pwm控制线就行电源线可以接外接电源
我们所用的舵机一般都是180°舵机,需要一个20ms的时基脉冲及50hz的脉冲
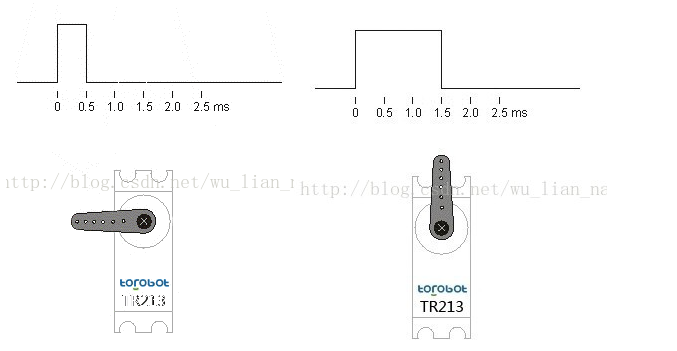
高电平在一个时基脉冲中占用的时间对应舵机转动的角度:
- 0.5ms —— 0° (最小的时间段)
- 1.0ms —— 45°
- 1.5ms —— 90°
- 2.0ms —— 135°
- 2.5ms —— 180°(最高的时间段)
RPi.gpio控制舵机采用的是占空比的方式。及将高电平在时基脉冲中占用的时间转化为百分比的形式,
角度转化为占空比的计算公式如下
1 | def Ang(ang): #可以自己动手算算 |
接下来是简单的舵机控制代码
1 | import RPi.GPIO as GPIO |