opencv_land_line
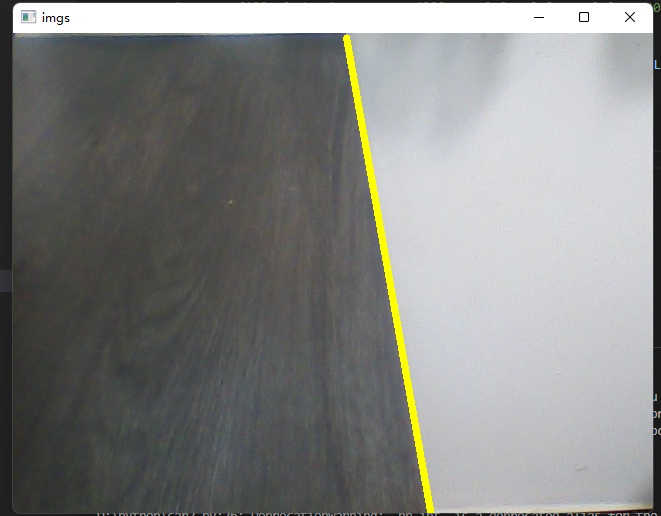
对于比赛的简单地图没有较为复杂的物体线条可以使用opencv的线条检测来检测车道,通过计算线条的斜率以及在图片中的位置可以判断小车车身的位置
首先来看两条图片以及最终效果

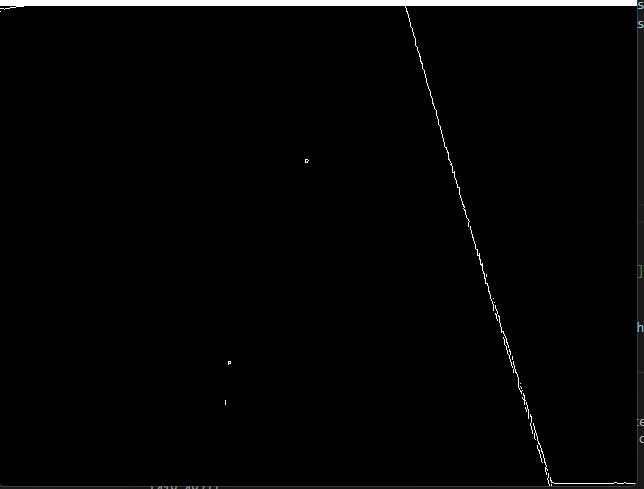
canny边缘检测得到图片中的所有线条
canny边缘检测是效果最好的一种
cv2.Canny(image, threshold1, threshold2, [, edges[, aper……]])
image: 图片对象
threshold:阈值1
threshold:阈值2
1 | img = cv2.imread('./n1.jpg') |
cv2.imshow一下得到如图
霍夫变换得到图中所有线条的列表
1 | lines = cv2.HoughLinesP(imgs, 1, np.pi/180, 15, minLineLength = 40, maxLineGap = 20) #霍夫变换 |
离群值计算
因为霍夫变换得到的线段很多都是图中的噪点产生的对结果有很大的干扰性
使用离群值算法剔除这些噪点产生的值保留目标附近的线段
1 | def slop(lines): |
最小二乘拟合将线段拟合成一条线段
1 | def fit(lines): |
所有代码
1 | import cv2 |
对于视频流的操作
1 | from types import NoneType |
对于检测车道上的多条线段可以通过线段的斜率以及相对位置区分各个不同的线段分别计算画出: